

Since the dawn of entomology (more or less), scientists have been pondering the question posed so eloquently in “High Hopes,” a song Jimmy Van Heusen and Sammy Cahn wrote for the 1959 movie A Hole in the Head, starring Frank Sinatra: Just what makes that little old ant think he’ll move that rubber tree plant?
Stephen Pratt, an associate professor at Arizona State University’s School of Life Sciences, knows the answer as well as anyone. He runs Pratt Lab, where researchers study how insect societies source food, build nests, and generally get along. The very short answer, he said, is that ants use collective, decentralized intelligence to perform complex tasks. It helps that they also lack an instinct for self-preservation and are focused only on actions that advance the group’s missions.
Unsurprisingly, the military industrial complex, mining companies, agriculture, and all sorts of other industries can’t wait to deploy swarms of drones for various applications—but neither can some conservationists and scientists.
These characteristics have piqued the interest of robotics engineers such as Vijay Kumar, a professor at the University of Pennsylvania’s Department of Mechanical Engineering and Applied Mechanics. He and the researchers in his GRASP (General Robotics, Automation, Sensing, and Perception) lab are developing “swarms” of UAVs that work in concert. These devices take hundreds of measurements each second, calculating their position in relation to each other, working cooperatively toward particular missions, and, just as important, avoiding each other despite moving quickly and in tight formations. Kumar and his colleagues are using intelligence from Pratt’s lab, particularly around how ants communicate and cooperate without any central commander, to make swarming UAVs even more autonomous.
Unsurprisingly, the military industrial complex, mining companies, agriculture, and all sorts of other industries can’t wait to deploy swarms of drones for various applications—but neither can some conservationists and scientists, who see the utility that swarms would bring to mapping, monitoring, and sensing the natural environment.
Serge Wich, a professor of primate biology at Liverpool John Moores University in the United Kingdom and a co-founder of Conservation Drones, said drones have made his research remarkably more efficient. He tracks and monitors orangutans, a time-consuming, labor-intensive process of hiking through Sumatran rainforests to find and study nests. With a camera mounted on a drone, however, he can monitor orders of magnitude more land in a given day than he can on foot.
But swarms could do more than just increase the amount of land scientists can monitor. They could also provide access in difficult places or situations. “If you try to monitor a large area for illegal activity, like wildlife poaching or logging, you have to watch it constantly,” Wich said. A single drone only has an hour or two of battery life at best. But a swarm could overcome this limitation. When the battery of any single drone depleted (they would expire at different rates depending on the sensors carried or length of recording time), it could autonomously return to the base camp while another UAV replaces it. Plus one drone might carry a camera and GPS receiver, while others might carry sensors for CO2, methane, light, temperature, or humidity. “I think there is huge potential for this,” Wich said.
Yet the operative word is “could.” Despite what this exceedingly high-tech commercial for Lexus might lead you to believe, swarming drones are not yet ready to be driven off the lot, so to speak. Aside from the fact that various and evolving regulations in countries around the world restrict where and how UAVs can be used, swarming UAV fleets operate today mostly inside academic labs and not in the many remote corners of the world where scientists conduct environmental research. That’s because they’re expensive and complex: You can’t orchestrate fleets of swarming, flying mini-robots using a smartphone app downloaded from iTunes. Yet. Plus the super-precise movements achieved inside labs can’t be replicated outdoors. That’s because in labs, motion-capture cameras are used to give tremendous control over spatial and temporal movements, whereas using GPS signals to map UAVs outdoors is sloppier. But in the coming years, all of those barriers—regulations, costs, accessibility—are set to fall.
Drones themselves are a marvel of engineering, but swarms of drones really up the ante in terms of the different networking protocols and processing power needed to operate them. That engineers are looking to insect behavior as inspiration for how to program UAVs to accomplish fast, complex, autonomous functions is no surprise. But don’t call it biomimicry, Kumar said.
“When the Wright brothers first tried to a build plane, they used flapping wings and that didn’t work,” he said. “So they built wings that were inspired by nature but that did not mimic nature.”
In the same way, Kumar is looking to understand the way, say, a single ant recruits other ants to help it build a new colony because that can help him develop algorithms for programming UAVs to recruit others to assist it in a given task. Or he might look to how ants work together to move a piece of food as inspiration for programming UAVs to lift a log and photograph whatever they find underneath it.
“Some ant species are very good at collective transport,” said Pratt. “They recruit to select the team of the right-sized ants. They move an object along tough terrain. So the question for both me as biologist and for Vijay as engineer is: What rules are each ant following?”
To answer that question Pratt and Vijay are collaborating on experiments. In one, they place a small object with embedded pressure sensors, covered in fig paste, in front of foraging ants of the species Aphaenogaster cockerelli. They then record the pushes and pulls each ant exerts. “I look at the shape of the object and then, by looking at that, I can determine which ants are pulling and pushing,” said Kumar, “and tease out the roles they take.”
They’ve learned that ants basically figure out who should push and who should pull through trail and error. “Imagine you and I are carrying a table across a room and you are blindfolded,” Kumar explained. “How do we know who needs to exert force? If you look at forces exerted by ants, over time, the amount of force that counteracts the other ant is minimized. They learn—consciously or not—to improve the equilibrium strategy over time.”
So far, Kumar has been able to translate that learning strategy into how terrestrial robots are programmed to interact with each other toward a common goal. Eventually he hopes to do that same for aerial robots.
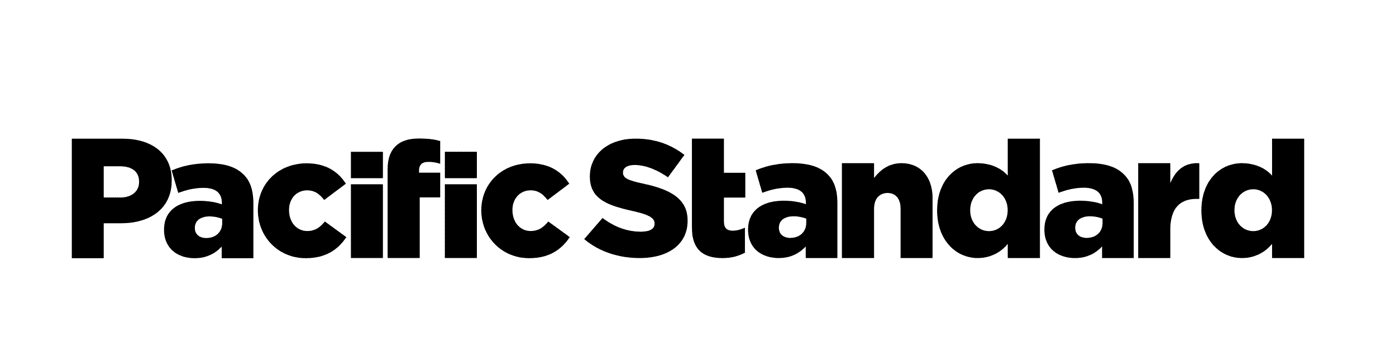
Of course, robotics engineers also need to improve insectile drones’ flying skills. To that end, Michel Maharbiz, associate professor of electrical engineering and computer sciences at the University of California-Berkeley, is studying beetles’ flight. He turns beetles into little cyborgs by saddling them with tiny “backpacks” that contain a micro-controller, battery, and radio, with minute leads inserted into the beetle’s brain and into power muscles used for flight. This apparatus allows Maharbiz to try biasing a beetle’s flight by stimulating certain muscles and studying its response.
“It’s very difficult to back out what an insect is doing in flight without having it in flight,” Maharbiz explained. “In the past people have studied larger animals, or they’ve tied insects lightly to a tether [to collect data], but they’re not really in free flight and that ends up masking [some functions].”
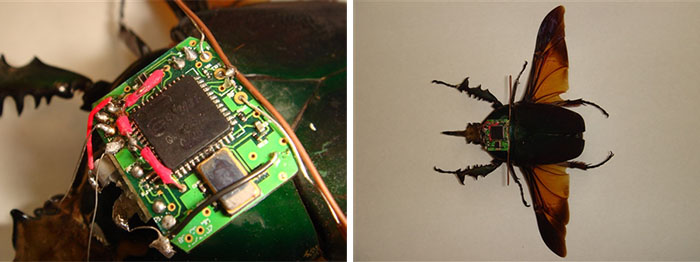
A beetle (
Mecynorrhina ugandensis
) is saddled with Maharbiz’s backpack. (Photo: Michel Maharbiz/University of California-Berkeley)
While engineers dive deeper into the insect world to make better robots, Wich is waiting for the day when he’ll be able to acquire swarming UAVs the same way he currently gets single drones for his scrappy organization: by building them himself using off-the-shelf parts.
Kumar said that day will arrive sooner than later. First, the “price to performance” ratio of everything from data storage to sensors is coming down rapidly, which means the barriers to iterating and innovating are coming down too. “Students in my lab can design and build a flying robot in two hours,” he boasted. Also, the communications protocols needed to coordinate swarms of UAVs—such as mesh networking, which allows the devices to send and receive messages directly with each other rather than through a main controller—are quickly becoming more robust.
“The ability to build customized robots in remote places … the chances of that becoming a reality are increasing every day,” said Kumar, adding that he sees great potential to use UAVs for environmental monitoring and, ultimately, to influence policy-making through science rather than politics. “Oftentimes science is called into question because we don’t have the data,” he said. In collecting environmental data, “I think that aerial robots can play a huge role.”
This article was produced by Climate Confidential and released for re-use under a Creative Commons Attribution 4.0 International License.

